@inproceedings{qi2016volumetric,
title={Volumetric and multi-view cnns for object classification on 3d data},
author={Qi, Charles R and Su, Hao and Nie{\ss}ner, Matthias and Dai, Angela
and Yan, Mengyuan and Guibas, Leonidas J},
booktitle={Proceedings of the IEEE conference on computer vision and pattern
recognition},
pages={5648--5656},
year={2016}
}
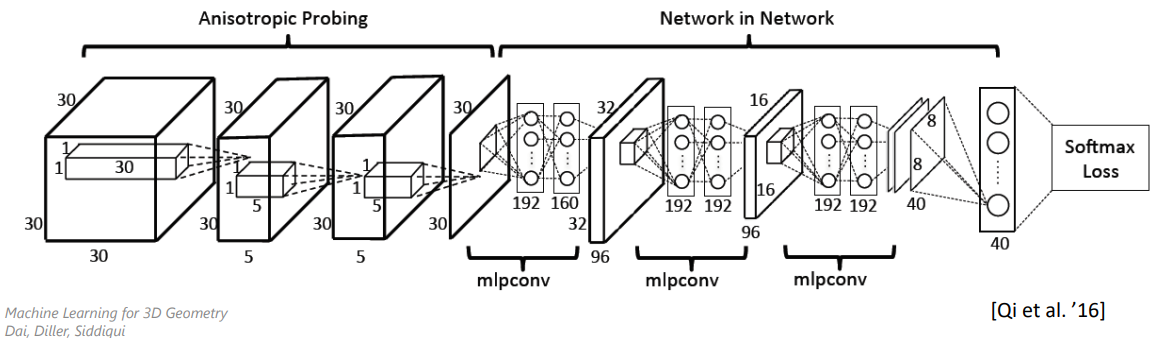
"""3D CNN network implementation"""
from torch import nn
import torch
class MLPConv(nn.Module):
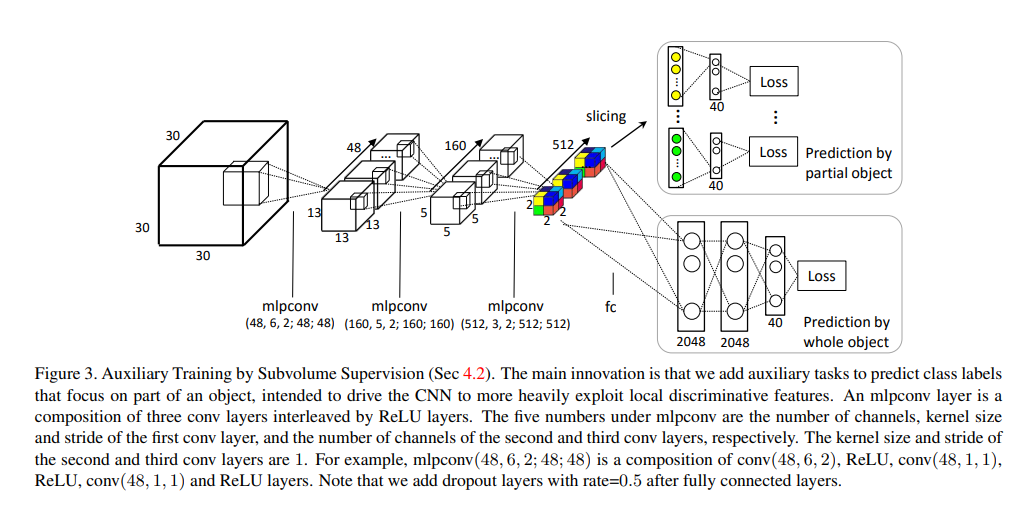
"""MLP Conv layer as described in Section 4.2 / Fig. 3 of https://arxiv.org/pdf/1604.03265.pdf"""
def __init__(self, in_channels, out_channels, kernel_size, stride):
"""
:param in_channels: number of input channels to the first conv layer
:param out_channels: number of output channels for conv layers
:param kernel_size: kernel_size of first conv layer
:param stride: stride of first conv layer
"""
super().__init__()
# NOTE: Define MLPConv model as nn.Sequential as described in the paper
# (Conv3d, ReLU, Conv3D, ReLU, Conv3D, ReLU) The first conv has
# kernel_size and stride provided as the parameters, rest of the convs
# have 1x1x1 filters, with default stride
self.model = nn.Sequential(
nn.Conv3d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride),
nn.ReLU(),
nn.Conv3d(in_channels=out_channels, out_channels=out_channels, kernel_size=1),
nn.ReLU(),
nn.Conv3d(in_channels=out_channels, out_channels=out_channels, kernel_size=1),
nn.ReLU(),
)
def forward(self, x):
"""
:param x: tensor of shape [B, C, D, H, W], where B = batch size, C = num feature channels, D = depth of volume, H and W = height and width of volume
"""
return self.model(x)
class ThreeDeeCNN(nn.Module):
"""
3DCNN Network as described in Section 4.2 / Fig. 3 of https://arxiv.org/pdf/1604.03265.pdf.
However, inputs here are 32x32x32 in contrast to original figure. Note that architecture does not change inspite of this.
"""
def __init__(self, n_classes):
"""
:param n_classes: Number of classes to classified, e.g. for our shapenet experiments we have a 13 class classification problem
"""
super().__init__()
# NOTE: Define backbone as sequence of 3 MLPConvs as per the paper
self.backbone = nn.Sequential(
MLPConv(1,48,6,2),
MLPConv(48,160,5,2),
MLPConv(160,512,3,2),
)
# print(*[asd.shape for asd in self.backbone[2].model.parameters()], sep="\n")
# help()
# help(self.backbone[2])
self.feature_cube_side = 2 # side of resulting volume after last MLPConv layer
# predictors for partial objects, i.e. for each of the elements of the 2x2x2 volume from the backbone
self.partial_predictors = nn.ModuleList()
for i in range(8):
self.partial_predictors.append(
# NOTE: partial predictor linear layers as per the paper
nn.Linear(512, n_classes)
)
# NOTE: add predictor for full 2x2x2 feature volume
self.full_predictor = nn.Sequential(
nn.Linear(4096, 2048),
nn.ReLU(),
nn.Linear(2048, 2048),
nn.ReLU(),
nn.Linear(2048, n_classes),
)
def forward(self, x):
"""
:param x: tensor of shape [B, C, D, H, W], where B = batch size, C = 1, D = 32, H = 32 and W = 32
:return: a tensor of shape [B, 9, n_classes], i.e. for each shape in the batch, the class scores for the whole object (1) and class scores for partial object (8)
"""
batch_size = x.shape[0]
# NOTE: Get backbone features
backbone_features = self.backbone(x)
# print("laksjfdhaslkfjhaslkjfhaslkjdfhlaksjdhfsalkjhf\n"*20)
# print(backbone_features.shape)
# print(backbone_features)
predictions_partial = []
# get prediction for each of the partial objects
for d in range(backbone_features.shape[2]):
for h in range(backbone_features.shape[3]):
for w in range(backbone_features.shape[4]):
partial_predictor = self.partial_predictors[d * self.feature_cube_side ** 2 + h * self.feature_cube_side + w]
# NOTE: get prediction for object for backbone feature at d, h, w
# print(backbone_features[:,:,d,h,w].shape)
partial_object_prediction = partial_predictor(backbone_features[:,:,d,h,w])
predictions_partial.append(partial_object_prediction)
# NOTE: Get prediction for whole object
full_prediction = self.full_predictor(backbone_features.view((batch_size,4096)))
return torch.stack([full_prediction] + predictions_partial, dim=1)
 over the sum of all the prediction
vectors (so the global prediction is worth the same as apartial one)
over the sum of all the prediction
vectors (so the global prediction is worth the same as apartial one)