Occupancy Networks
@inproceedings{mescheder2019occupancy,
title={Occupancy networks: Learning 3d reconstruction in function space},
author={Mescheder, Lars and Oechsle, Michael and Niemeyer, Michael and
Nowozin, Sebastian and Geiger, Andreas},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition},
pages={4460--4470},
year={2019}
}
- Related to DeepSDF but leveraging occupancy instead of distances
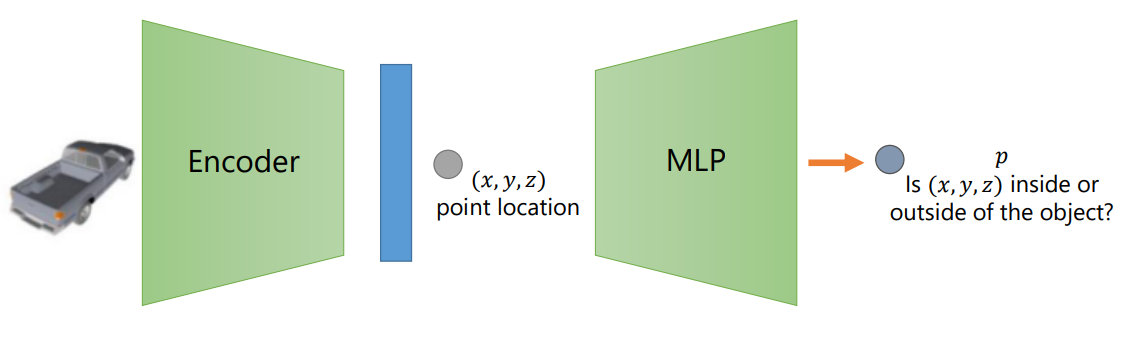
- Encoder-Decoder kind of training
- Can also do latent space interpolation
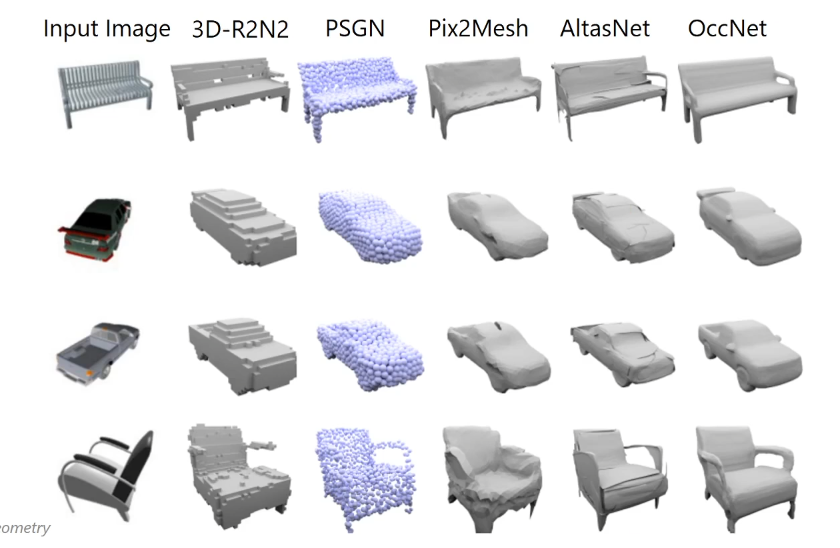
We then describe how we can learn a model that infers this representation from various forms of input such as point clouds, single images and low-resolution voxel representations.
Each output position is assigned a occupancy probability between 0 and 1.
Note that this network is equivalent to a neural network for binary classification, except that we are interested in the decision boundary which implicitly represents the object’s surface.

- Shape surface is then the isosurface at